

Circuit Integré L293D
Le plus populaire est le L293D, Pont-H de puissance moyenne (600mA) pouvant être utilisé à partir d’un Arduino.
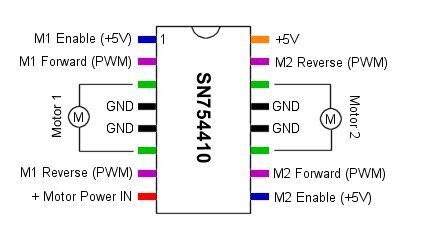
Exemple d’utilisation pour piloter 2 moteurs à courant continu :
| Pin | Name | Fonction | Notes |
| 1 | 1,2 EN | Activation Moteur 1 | En mettant cette pin au 0V (LOW ou GND), cela coupera l’alimentation du moteur et en la mettant au 5V (HIGH), cela activera l’alimentation du moteur. |
| 2 | 1A | Moteur 1 Forward | Un 5V (HIGH) sur cette pin permettra au moteur de tourner dans une direction. La vitesse peut être contrôllé à l’aide d’une PWM. |
| 3 | 1Y | Moteur 1 Power | Cette pin doit être connecté à l’une des broches du moteur à courant continu. |
| 4 | Masse | Masse | Cette pin doit être connecté à la masse. |
| 5 | Masse | Masse | Cette pin doit être connecté à la masse. |
| 6 | 2Y | Moteur 1 Power | Cette pin doit être connecté à l’une des broches du moteur à courant continu. |
| 7 | 2A | Moteur 1 Reverse | Un 5V (HIGH) sur cette pin permettra au moteur de tourner dans direction inverse.La vitesse peut être contrôllé à l’aide d’une PWM. |
| 8 | VCC2 | Moteur Power Source | Cette pin permet d’alimenter vos moteur (max 36V) |
| 9 | 3,4 EN | Moteur 2 Enable | En mettant cette pin au 0V (LOW ou GND), cela coupera l’alimentation du moteur et en la mettant au 5V (HIGH), cela activera l’alimentation du moteur. |
| 10 | 3A | Moteur 2 Forward | Un 5V (HIGH) sur cette pin permettra au moteur de tourner dans une direction. La vitesse peut être contrôllé à l’aide d’une PWM. |
| 11 | 3Y | Moteur 2 Power | Cette pin doit être connecté à l’une des broches du moteur à courant continu. |
| 12 | Masse | Masse | Cette pin doit être connecté à la masse. |
| 13 | Masse | Masse | Cette pin doit être connecté Suivi des prix en Tunisie
0 TND
Prix min
3 TND
Prix max
0 TND
Prix actuel
Référence : SC-0362
Le vendeur : Smart cube DétailsDans son principe de base, le pont H est un assemblage de 4 transistors (2 PNP et 2 NPN) monté de telle façon que le courant puisse passer soit dans un sens, soit dans l’autre au travers de la charge (un moteur continu par exemple). |